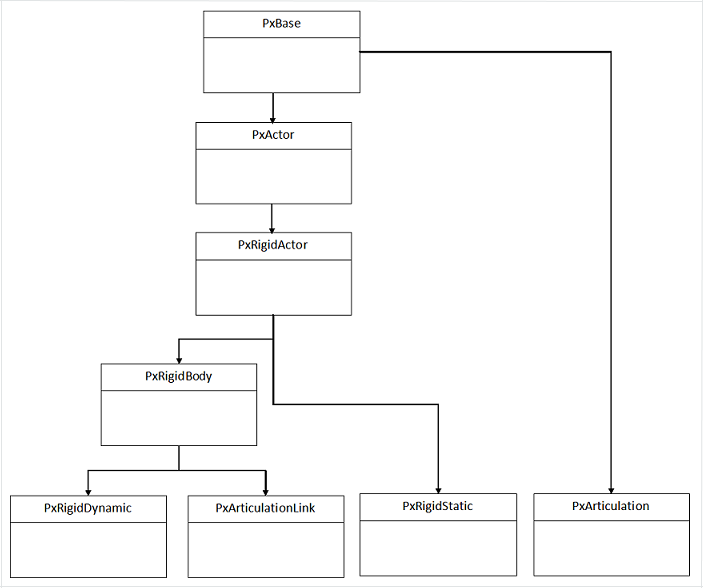
- PhysX는 위와 같은 RigidBody / Actor 모델을 사용한다.
| 클래스 | 확장 | 기능 |
| PxBase | N/A | 리플렉션 / 쿼리 |
| PxActor | PxBase | 액터의 이름과 플래그 |
| PxRigidActor | PxActor | 모양 |
| PxRigidBody | PxRigidActor | 질량, 관성, 속도, 바디 플래그 |
| PxRigidStatic | PxRIgidActor | 씬의 정적 바디 인터페이스 |
| PxRigidDynamic | PxRigidBody | 씬의 동적 바디 인터페이스 |
| PxArticulationLink | PxRigidBody | - |
| PxArticulation | PxBase | - |
RigidBody Pipeline

- Tutorial에서 설명한 내용과 같이, PxFoundation에서 시스템에 대한 전반적인 내용을 관리한다
- PxPhysics 클래스는 씬과 액터 등을 생성
- 그리고 아래와 같이 시뮬레이션을 시작한다
mAccumulator = 0.0f;
mStepSize = 1.0f / 60.0f;
virtual bool advance(PxReal dt)
{
mAccumulator += dt;
if(mAccumulator < mStepSize)
return false;
mAccumulator -= mStepSize;
mScene->simulate(mStepSize);
return true;
}- 시뮬레이션이 완료되면 아래 코드를 통해 결과값이 반환된다.
mScene -> fetchResults ( true );
'PhysX > [NVIDIA] PhysX_Tutorial' 카테고리의 다른 글
| 6. PhysX - RigidBody 충돌 - 2 (0) | 2023.03.03 |
|---|---|
| 5. PhysX - RigidBody 충돌 - 1 (0) | 2023.03.03 |
| 3. PhysX - Geometry (0) | 2023.03.03 |
| 2. PhysX API (0) | 2023.03.02 |
| 1. PhysX 초기화 (0) | 2023.02.25 |

댓글